概览
LMR14050 是 TI 推出的一款 5A 降压型开关电源芯片,适合输入电压范围较宽、输出电流要求较高的 Buck 场景。它支持 4V-40V 输入,输出电压可覆盖 0.8V-28V,并提供较低静态电流、外部电阻可编程开关频率,以及较完整的保护机制。
和很多同类器件相比,LMR14050 的优势在于外围元件相对精简,工程上比较适合做通用 DC-DC 模块、电池供电系统前级、车载或工业电源降压等场景。
主要特性
| 参数项目 | 规格指标 | 备注 |
|---|---|---|
| 拓扑结构 | 非同步 Buck(异步降压) | 外部需接续流二极管 |
| 输入电压(VIN) | 4V ~ 40V | 适合 12V、24V 等直流供电系统 |
| 输出电压(VOUT) | 0.8V ~ 28V | 支持可调输出 |
| 最大输出电流(IOUT) | 5A(持续) | 内置逐周期电流限制 |
| 开关频率(fSW) | 200kHz ~ 2.5MHz | 可通过电阻设置,也支持外部时钟同步 |
| 静态电流(IQ) | 40µA(空载) / 1µA(关断) | 待机功耗低 |
| 封装形式 | HSOIC-8 | 带 PowerPAD 散热焊盘 |
- 器件型号:LMR14050SDDA
- 输入电压:4V-40V
- 输出电压:0.8V-28V
- 输出电流:5A 持续输出
- 工作频率:200kHz-2.5MHz
- 参考价格:约 ¥11.3
- 其他特性:
- 1µA 关断电流
- 90mΩ 高侧 MOS 管
- 75ns 最短导通时间
- 电流模式控制
- 支持热保护、过压保护和短路保护
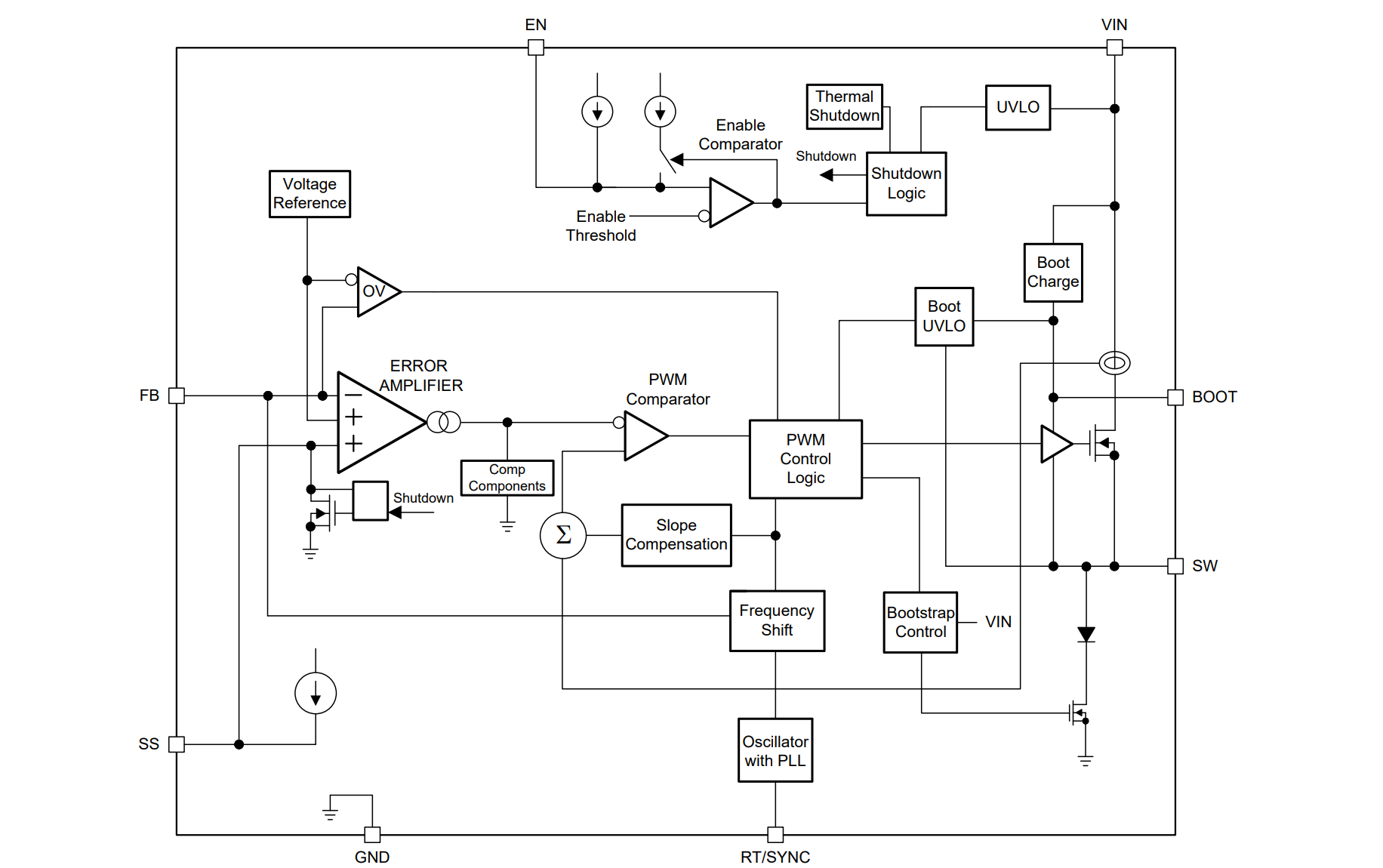
内部功能框图
引脚定义
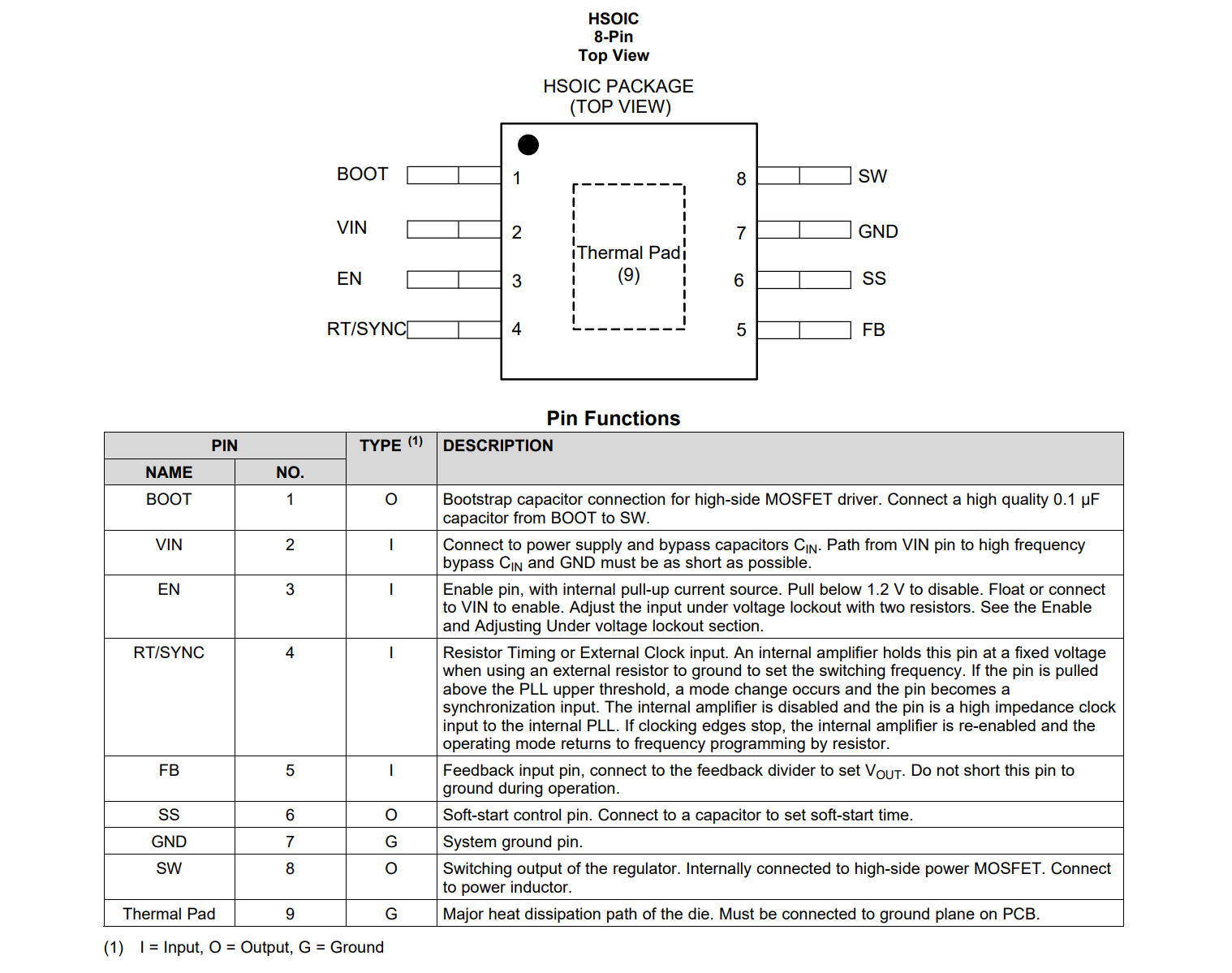
BOOT:高侧 MOS 驱动的自举端,通常在BOOT和SW之间接一个0.1uF电容。VIN:电源输入端,前面需要布置输入去耦电容C_{IN}。EN:使能控制引脚,内部带上拉。低于1.2V时关闭输出,悬空或拉高时可使能芯片;也可用于实现外部欠压锁定。RT/SYNC:频率设定/外部同步输入脚。接电阻到地时用于设置开关频率;输入外部时钟时可进入同步模式。FB:反馈输入脚,由输出电压分压后接入,用于闭环调节,不能直接接地。SS:软启动引脚,通过外接电容设置启动斜率与软启动时间。若输入输出电容太大,将外接电容增大SW:开关节点,内部连接高侧 MOS,外部接功率电感和续流回路。sw回路尽量小
工作机制与关键特性
稳压原理
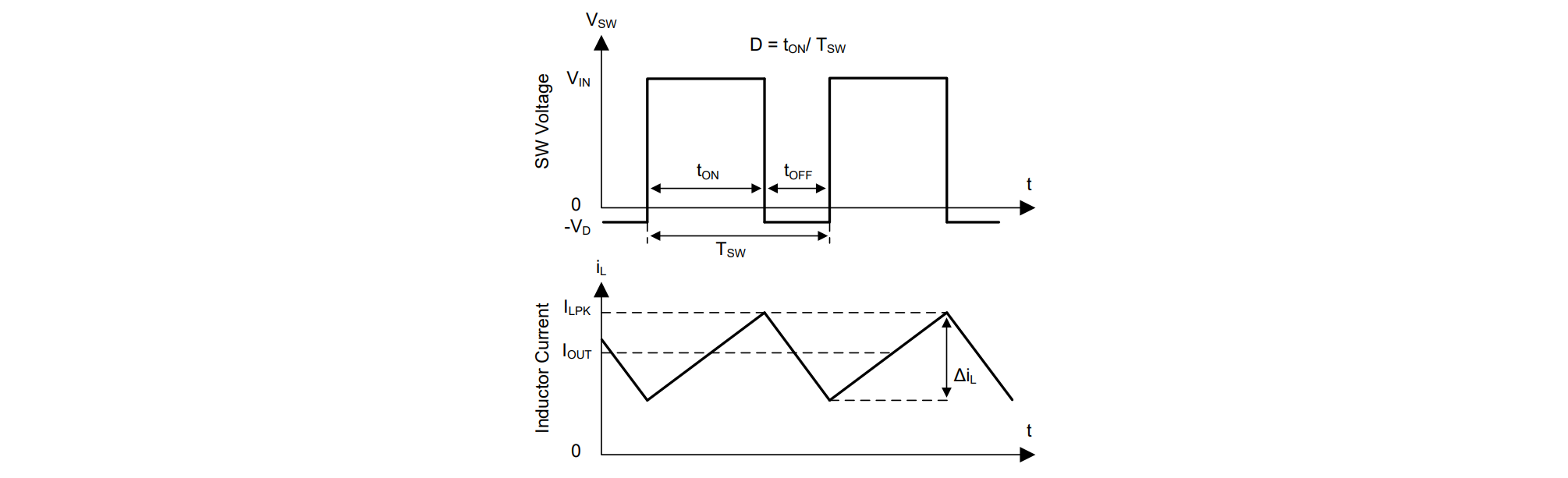
LMR14050 通过控制高侧 N-MOS 的导通时间来调节输出电压。在高侧 N-MOS 导通期间,SW 节点电压接近 $V_{IN}$,电感电流以斜率 $(V_{IN}-V_{OUT})/L$ 上升;当高侧 N-MOS 关断后,电感电流通过续流二极管回路释放能量,并以 $V_{OUT}/L$ 的斜率下降。
从控制角度看,Buck 的核心变量是占空比 $D=t_{\mathrm{ON}}/T_{\mathrm{SW}}$。在理想条件下,输出电压与输入电压的关系近似满足:
$$ D \approx \frac{V_{\mathrm{OUT}}}{V_{\mathrm{IN}}} $$
也就是说,控制环路本质上是在动态调节占空比,以维持目标输出电压。
连续导通模式(CCM)下的 SW 电压与电感电流的对应关系:
睡眠模式
在轻载条件下,芯片会进入睡眠模式,以降低开关损耗和门极驱动损耗,从而提升轻载效率。根据器件特性,当输出峰值电流低于约 300mA 时,会触发这一路径。
BOOT 自举电路的设计
LMR14050 内部集成了高侧驱动所需的自举电路,只需在 BOOT 与 SW 之间接入一个自举电容,即可为高侧 MOS 管门极提供驱动电压。常见推荐值为 0.1uF,建议选用 X7R/X5R 陶瓷电容,耐压至少 16V。
输出电压调节
芯片内部基准电压为 0.75V。输出端通过电阻分压后送入 FB 引脚,与内部基准比较,从而实现闭环调节。分压电阻建议使用精度 1% 或更高、温漂 100ppm 或更低的器件。
通常先根据期望分压电流选定低侧电阻 $R_{\mathrm{FBB}}$,参考范围是 10kΩ-100kΩ,再按下式计算高侧电阻 $R_{\mathrm{FBT}}$。阻值偏大有助于降低轻载损耗,但也会让 FB 节点更容易受噪声干扰,需要在效率与抗干扰之间做平衡。
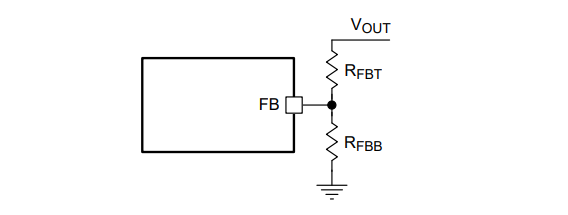
$$ R_{\mathrm{FBT}}=\frac{V_{\mathrm{OUT}}-0.75}{0.75}R_{\mathrm{FBB}} $$
EN 使能与欠压锁定调节
当 $V_{\mathrm{IN}}$ 高于 3.7V,且 EN 高于 1.2V 阈值时,LMR14050 开始工作;当 $V_{\mathrm{IN}}$ 降到 3.52V 以下,或 EN 低于 1.2V 时,芯片关闭输出。EN 引脚内部带有约 1uA 上拉电流源,因此悬空时也可以默认使能。
可通过调节 EN 的外部上下拉电阻,以调节启动和关闭的电压阈值:
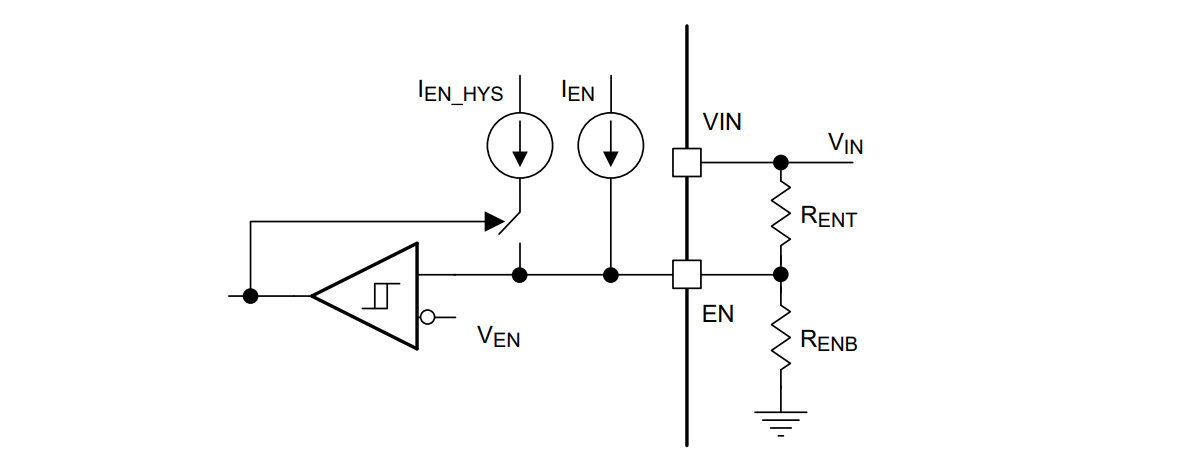
$R_{\mathrm{ENT}}$ 和 $R_{\mathrm{ENB}}$ 可按以下公式估算:
$$ R_{\mathrm{ENT}}=\frac{V_{\mathrm{START}}-V_{\mathrm{STOP}}}{I_{\mathrm{HYS}}} $$
$$
R_{\mathrm{ENB}}=\frac{V_{\mathrm{EN}}}{\frac{V_{\mathrm{START}}-V_{\mathrm{EN}}}{R_{\mathrm{ENT}}}+I_{\mathrm{EN}}} $$
其中,$V_{\mathrm{START}}$ 是期望的启动阈值,$V_{\mathrm{STOP}}$ 是期望的欠压关闭阈值,$I_{\mathrm{HYS}}$ 是当 EN 电压超过 1.2V 后由内部提供的滞回电流,典型值约为 3.6uA。
外部缓启动
软启动用于抑制上电瞬间的浪涌电流和输出过冲,可通过 SS 与 GND 之间的电容 $C_{\mathrm{SS}}$ 进行设置。芯片内部有一个电流源 $I_{\mathrm{SS}}$(典型值 3uA)对该电容充电,形成由 0V 上升到 $V_{\mathrm{REF}}$ 的斜坡,进而限制启动速度。
软启动时间可按下式估算:
$$ t_{\mathrm{SS}}(\mathrm{ms})=\frac{C_{\mathrm{SS}}(\mathrm{nF}) \cdot V_{\mathrm{REF}}(\mathrm{V})}{I_{\mathrm{SS}}(\mathrm{\mu A})} $$
当稳压器失能或进入内部关断状态时,软启动过程会被重新复位。
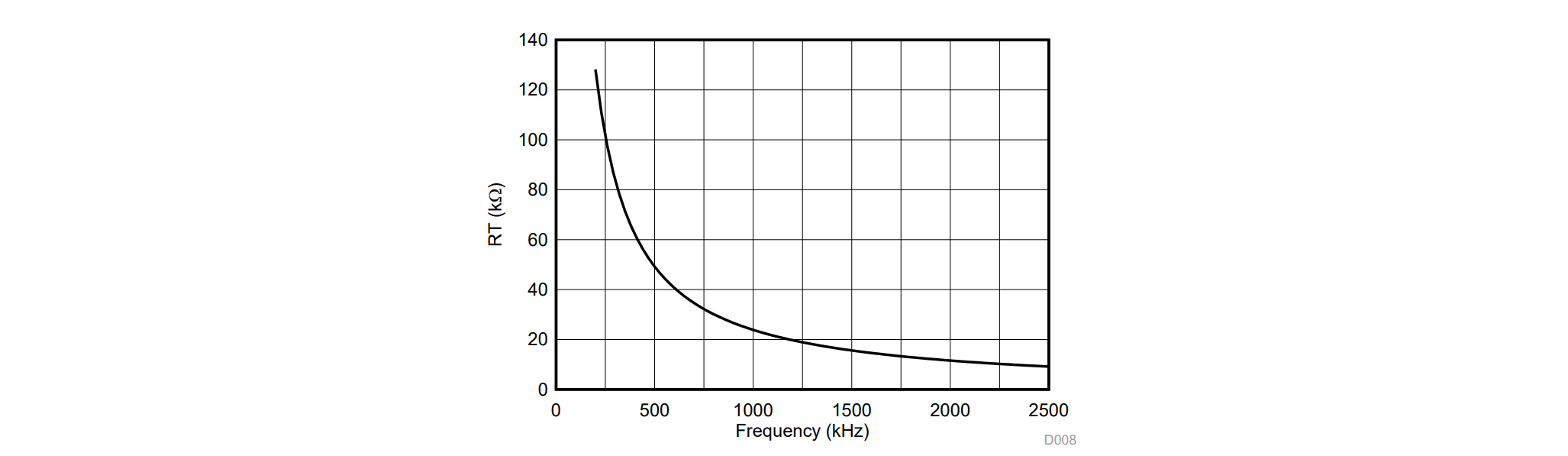
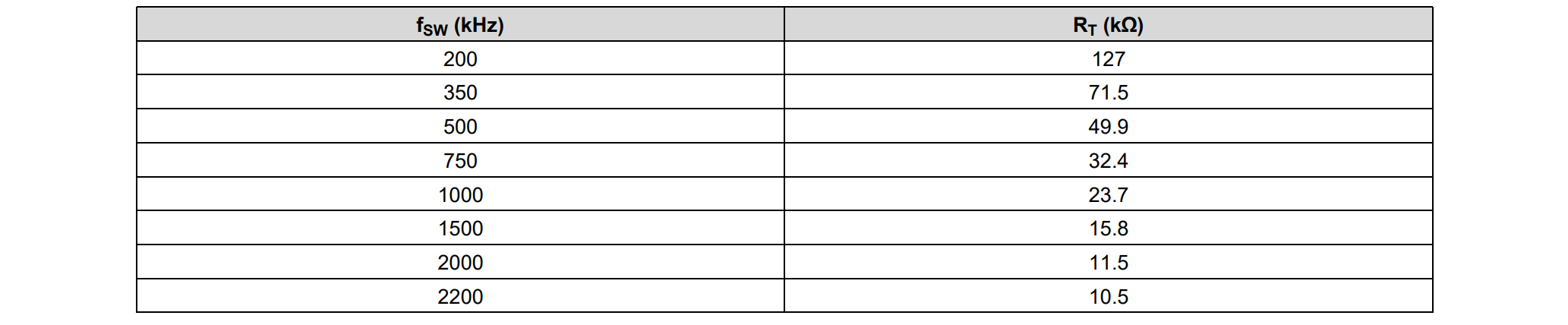
开关频率与同步(RT/SYNC)
LMR14050 的开关频率可通过 RT/SYNC 与 GND 之间的电阻 $R_T$ 来设定。工程上这个引脚不能悬空,应根据目标频率选择合适的阻值。
$$ R_T(\mathrm{k\Omega})=32537 \cdot f_{\mathrm{SW}}^{-1.045}(\mathrm{kHz}) $$
LMR14050 也支持外部时钟同步,频率范围约为 250kHz-2.3MHz:

内部振荡器会锁定到外部时钟的下降沿。外部时钟建议满足以下条件:高电平不低于 1.7V,低电平不高于 0.5V,最小脉宽不低于 30ns。若外部时钟源内阻较低,可通过 AC 耦合电容 $C_{COUP}$(例如 10pF)和终端电阻 $R_{TERM}$(例如 50Ω)做阻抗匹配,同时保留频率设定电阻 $R_T$。
过流与短路保护
LMR14050 采用逐周期峰值电流限制来应对过流和短路场景。每个开关周期都会比较高侧开关电流与误差放大器输出(含斜率补偿后的控制量),一旦达到内部峰值限流阈值,就会限制导通行为。这个峰值限流阈值是内部固定钳位,因此在整个占空比范围内都相对稳定。
过压保护
LMR14050 集成了输出过压保护(OVP)电路,用于限制负载突降或环路异常时的输出过冲。当 FB 电压上升到 OVP 门限(约为 VREF 的 109%)时,高侧 MOS 管会被关闭;当 FB 电压回落到恢复阈值(约为 VREF 的 107%)以下后,芯片恢复正常工作。
热关断保护
芯片内部带热关断保护。当结温超过约 170℃ 时,热保护触发,高侧 MOS 停止开关;当温度回落到约 158℃ 以下后,器件才会重新启动。
参考设计
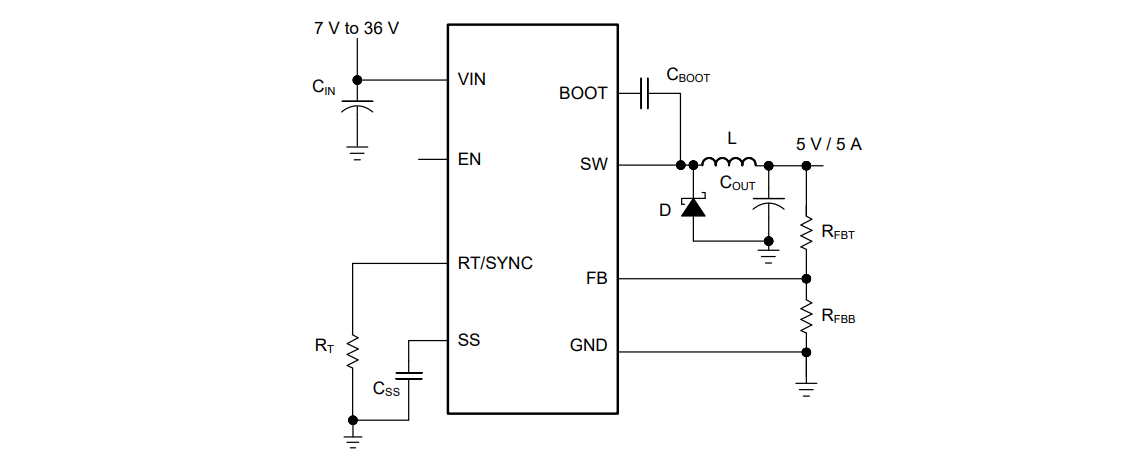
下面这份参考设计的目标参数如下:
- 输入电压 $V_{\mathrm{IN}}$:7-36V,典型值为 12V
- 输出电压 $V_{\mathrm{OUT}}$:5V
- 最大输出电流 $I_{\mathrm{O_MAX}}$:5A
- 瞬态响应(0.5-5A):5%
- 输出电压纹波:50mV
- 输入电压纹波:400mV
- 开关频率 $f_{\mathrm{SW}}$:300kHz
- 缓启动时间:5ms
输出电压设置
如果目标输出为 5V,可选择 $R_{\mathrm{FBT}}=100,\mathrm{k\Omega}$、$R_{\mathrm{FBB}}=17.4,\mathrm{k\Omega}$(接近理论值 17.65kΩ,兼顾标准阻值与调试便利)。
如果目标输出为 12V,可选择 $R_{\mathrm{FBT}}=100,\mathrm{k\Omega}$、$R_{\mathrm{FBB}}=6.34,\mathrm{k\Omega}$(接近理论值 6.666kΩ)。
开关频率设置
这里选择 300kHz 的开关频率。按前面的公式计算,$R_T$ 约为 84.5kΩ,工程上可直接使用相近标准值 83.9kΩ。
输出电感选型
对于 Buck 电路而言,电感的三个关键参数分别是电感值、饱和电流和 RMS 电流。电感值通常由目标峰峰值纹波电流 $\Delta i_L$ 决定,而纹波电流会随着输入电压升高而变大,因此通常使用最大输入电压来计算最小电感值 $L_{\mathrm{MIN}}$。
$$ \Delta i_L=\frac{V_{\mathrm{OUT}}\left(V_{\mathrm{IN_MAX}}-V_{\mathrm{OUT}}\right)}{V_{\mathrm{IN_MAX}} \cdot L \cdot f_{\mathrm{SW}}} $$
$$ L_{\mathrm{MIN}}=\frac{V_{\mathrm{IN_MAX}}-V_{\mathrm{OUT}}}{I_{\mathrm{OUT}} \cdot K_{\mathrm{IND}}} \cdot \frac{V_{\mathrm{OUT}}}{V_{\mathrm{IN_MAX}} \cdot f_{\mathrm{SW}}} $$
其中,$K_{\mathrm{IND}}$ 表示电感纹波电流与最大输出电流的比值,常见取值范围为 20%-40%。在短路或过流等极端情况下,电感的 RMS 电流和峰值电流都会上升,因此其额定值必须高于限流门限。
从动态性能看,较小的电感值通常意味着更快的瞬态响应、更低的 DCR 和更小的体积;但如果电感过小,纹波电流会明显增大,既可能在满载时过早触发过流保护,也会增加导通损耗和输出纹波。对于峰值电流模式控制来说,纹波也不能过小,否则比较器的信噪比会变差。
在这份参考设计中,$K_{\mathrm{IND}}=0.4$,计算得到最小电感值约为 7.17uH,因此最终选择 8.2uH 更合适。额定参数上,可考虑 7A RMS、10A 饱和电流等级的 8.2uH 铁氧体电感。
输出电容选型
输出电容 $C_{\mathrm{OUT}}$ 会直接影响稳态纹波、环路稳定性以及负载跃迁时的电压过冲/下冲。输出纹波通常可以拆成两部分:一部分来自电感纹波电流在输出电容 ESR 上形成的压降,另一部分来自电容本身的充放电。
$$ \Delta V_{\mathrm{OUT_ESR}}=\Delta i_L \cdot \mathrm{ESR}=K_{\mathrm{IND}} \cdot I_{\mathrm{OUT}} \cdot \mathrm{ESR} $$
另一种是由电感电流纹波对输出电容充放电引起的:
$$ \Delta V_{\mathrm{OUT_C}}=\frac{\Delta i_L}{8 \cdot f_{\mathrm{SW}} \cdot C_{\mathrm{OUT}}}=\frac{K_{\mathrm{IND}} \cdot I_{\mathrm{OUT}}}{8 \cdot f_{\mathrm{SW}} \cdot C_{\mathrm{OUT}}} $$
这两部分纹波通常不同相,因此实际峰峰值往往小于两者的简单相加。
如果系统对负载阶跃响应要求较高,那么输出电容的选型还需要满足瞬态指标。当负载突然升高时,电感电流还来不及立刻跟上,输出电容需要先补上这部分电荷;而当负载突然下降时,电感中原本储存的能量又会推高输出电压,因此同样需要输出电容吸收这部分能量。
计算特定输出下冲所需的最小输出电容,可使用:
$$ C_{\mathrm{OUT}}>\frac{3\left(I_{\mathrm{OH}}-I_{\mathrm{OL}}\right)}{f_{\mathrm{SW}} \cdot V_{\mathrm{US}}} $$
将电压过冲限制在指定范围内时,可使用:
$$ C_{\mathrm{OUT}}>\frac{I_{\mathrm{OH}}^2-I_{\mathrm{OL}}^2}{\left(V_{\mathrm{OUT}}+V_{\mathrm{OS}}\right)^2-V_{\mathrm{OUT}}^2} \cdot L $$
其中,
- $K_{\mathrm{IND}}$ 为电感纹波电流的纹波比($\Delta i_L / I_{\mathrm{OUT}}$)
- $I_{\mathrm{OL}}$ 为负载瞬态期间的低电平输出电流
- $I_{\mathrm{OH}}$ 为负载瞬态期间的高电平输出电流
- $V_{\mathrm{US}}$ 为目标输出电压下冲
- $V_{\mathrm{OS}}$ 为目标输出电压过冲
在参考设计中,目标输出纹波设为 50mV。若假设 $\Delta V_{\mathrm{OUT_ESR}}=\Delta V_{\mathrm{OUT_C}}=50\mathrm{mV}$,取 $K_{\mathrm{IND}}=0.4$,要求 ESR ≤ 25mΩ,则可先估算出 $C_{\mathrm{OUT}} \ge 16.7\mathrm{\mu F}$。再结合瞬态指标,设 $V_{\mathrm{US}}=V_{\mathrm{OS}}=5%\times V_{\mathrm{OUT}}=250\mathrm{mV}$,可分别算出输出电容下限约为 180uF 和 79.2uF。因此最终应取更严格的 180uF,例如使用 4 个 47uF / 16V / X7R 陶瓷电容并联。
肖特基二极管选型
二极管的反向耐压建议至少高于最大输入电压 25%。从可靠性出发,其额定电流最好不低于稳压器最大输出电流;如果输入电压远高于输出电压,二极管的平均电流会下降,这时也可以按约 $(1-D)\times I_{\mathrm{OUT}}$ 粗略估算,但峰值电流额定值仍应高于最大负载电流。工程上通常从 6A-7A 档位开始选更稳妥。
输入电容选型
LMR14050 通常需要同时配置高频输入去耦电容和较大容量的输入缓冲电容。高频去耦部分推荐 4.7uF-10uF 的 X5R/X7R 陶瓷电容,耐压建议至少为最大输入电压的两倍。在参考设计中,使用了两个 100V / 2.2uF / X7R 陶瓷电容,并且需要尽量靠近芯片输入端放置。
大容量输入电容主要用于缓冲低频波动并抑制输入尖峰,常见取值可选 47uF 或 100uF 电解电容。
BOOT 自举电容选型
这一项与前文一致,BOOT 自举电容可直接取 0.1uF,建议使用 X7R/X5R 陶瓷电容,耐压不低于 16V。
缓启动电容选型
如果目标软启动时间为 5ms,按前面的公式计算后,可选择 22nF 作为软启动电容,较接近理论值 20nF。
Layout 参考
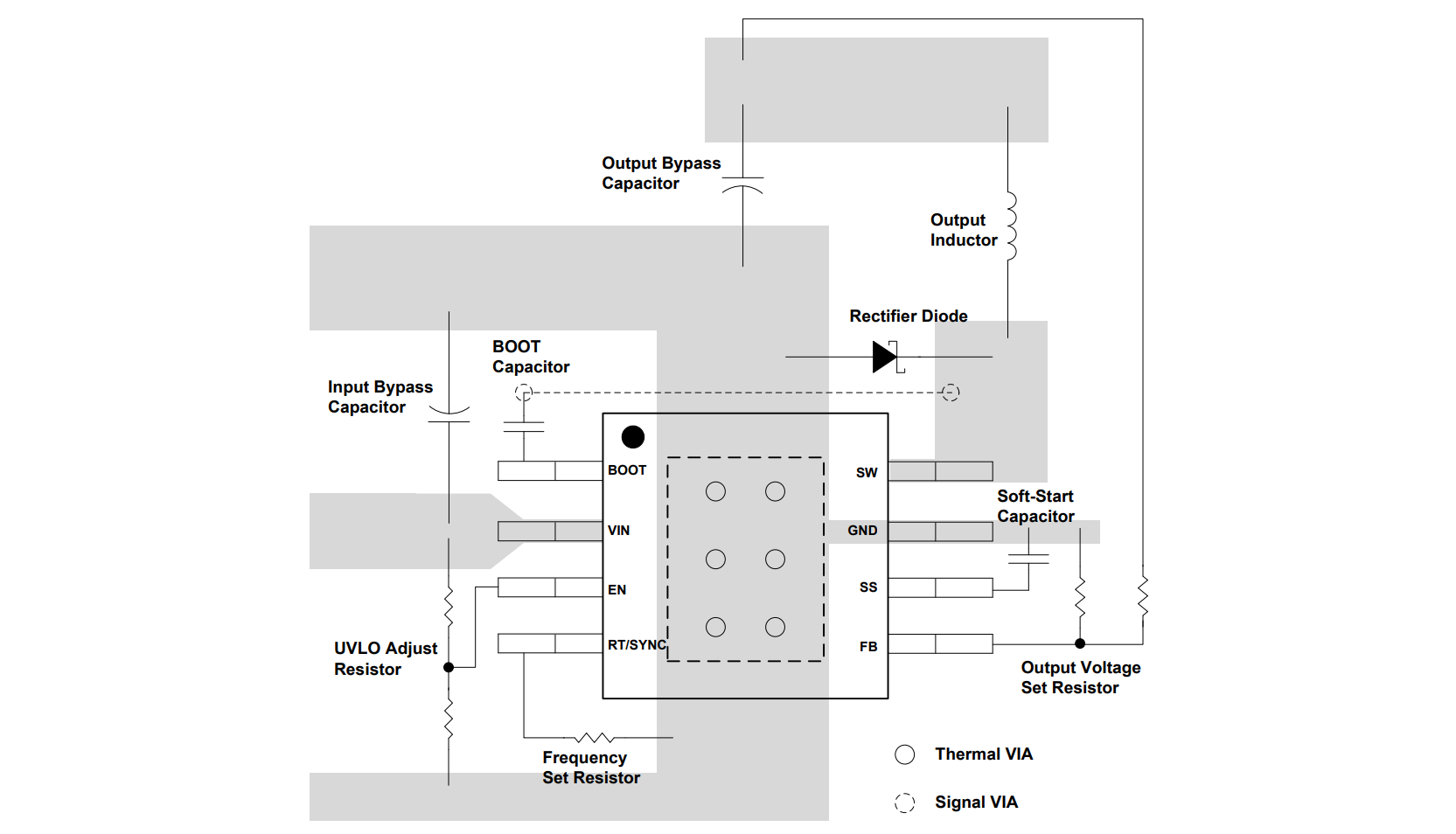
对于这类 Buck 电源,Layout 往往比公式计算更容易决定最终效果。下面这些布线建议基本都和环路面积、噪声耦合以及接地回流有关:
- 反馈网络、尤其是 $R_{FBT}$ 和 $R_{FBB}$,应尽量靠近
FB引脚,输出采样线要远离SW等高噪声区域。 - 输入去耦电容要紧贴
VIN与GND放置,优先缩小输入高 di/dt 回路。 - 功率电感尽量靠近
SW引脚,减少开关节点的暴露面积。 - 输出电容 $C_{OUT}$ 应尽量靠近电感与二极管节点,相关走线越短越好。
- 二极管、$C_{IN}$ 和 $C_{OUT}$ 的接地回流要紧凑,最好采用单点方式再并入系统地,以降低传导噪声。
实际测试
在 24V 输入、5V/5A 满载输出条件下,实测输出约为 4.95V / 5.00A,纹波约 15mV,器件温度约 110℃。
从结果来看,这套方案在输出精度和纹波表现上都比较稳定,但温升已经不算低。如果后续要进一步优化可靠性,优先可以从散热铜皮、过孔导热、开关频率以及肖特基二极管损耗几个方向继续下手。
参考与致谢
原文地址:https://wiki-power.com/
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。